
當今的塑料部件,尤其是在汽車工業中,變得越來越復雜。這產生了不能再用常規切割方法經濟地加工的部件。此外,近年來,產品更換和人才成本提升的速度急劇增加。結果是由于成本的高變動,剛性的生產裝置不實用。當今最好的解決方案可能是使用機器人進行靈活的自動化。另外,實時焊縫跟蹤、縫隙橋接、光束振蕩和混合焊接等技術與激光相關的工藝相適應,使機器人可以以更主流的方式使用。
激光混合焊接技術
激光混合焊接在一個共同的過程中結合了兩種方法的優點-激光焊接和氣體金屬電弧焊。主要優點包括極高的焊接速度、最小的變形和較小的熱影響區,以及非常好的冶金和機械性能。它已經用于汽車結構中較薄壁結構部件的焊接。比如移動式起重機的混凝土泵和懸臂制造。在這里,要加工高強度鋼,而其他生產方法會增加支出,例如額外的預熱,以防止變形。此外,激光混合焊接可以應用于軌道車輛的結構以及一般的鋼結構中,例如橋梁構件的生產和油罐的生產。
實時焊縫跟蹤技術
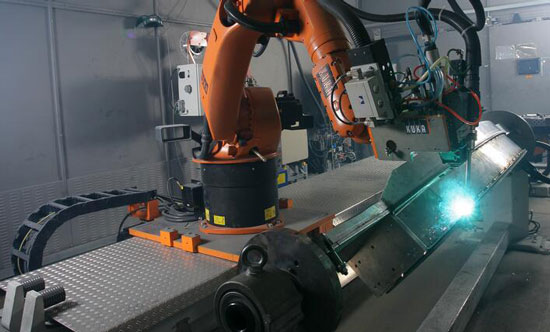
激光傳感器應用范圍比較廣的是用于弧焊機器人生產線。激光傳感器通過向機器人控制器提供有關零件位置的更可靠和可重復的反饋,從而提高了性能。使機器人能夠快速而準確地定位焊縫。它不僅減少了切割焊絲的需要,而且大大縮短了加工時間,還消除了焊絲的偏斜,從而提供了更快的運行速度。
創想激光傳感器結構緊湊,與焊炬成一直線安裝,可以輕松地改裝到現有的機器人裝置中。提供易于使用的指令,以從攝像機讀取包括焊縫偏移和焊縫幾何信息的數據。該信息可用于調整機器人焊接路徑和參數,以適應具有不同位置和裝配的零件。
該傳感器使機器人可以高速、實時地跟蹤焊接接頭,即使零件在協調的定位器上轉動也是如此。當在油箱或類似容器周圍焊接圓周焊縫時,也具有明顯的優勢。此外,該傳感器具有自適應功能,可根據來自傳感器的接頭間隙信息來改變焊接條件,從而實現優化、高度精確的焊接。











