
焊接機器人在全球的裝配線中越來越多地被使用。不斷提高對具有恒定質量水平的最佳生產率的需求,因此機器人焊接在許多應用中都是必不可少的。在這種過程中,將路徑編程到機器人中,然后為所有要焊接的零件調用該路徑。但是,由于焊接物體的公差,可能會有輕微的偏差。還必須考慮焊接材料的熱膨脹,因為翹曲也會影響焊縫的位置。

為了校正零件公差本身的影響,常規應用中的機器人路徑通常通過示教手動進行校正。但是,不能以這種方式補償由熱膨脹引起的變形的影響。
為此,激光焊縫跟蹤傳感系統,為機器人焊接提供了理想的解決方案。激光焊縫跟蹤傳感系統,在加工前立即測量焊縫的真實位置和寬度。當激光傳感器檢測到焊縫的真實尺寸時,相關的軟件會同時將目標位置發送給機器人,機器人使用該位置在X或Z方向上進行校正運動。以這種方式,不僅可以補償由零件公差引起的偏差,而且可以補償翹曲效應。
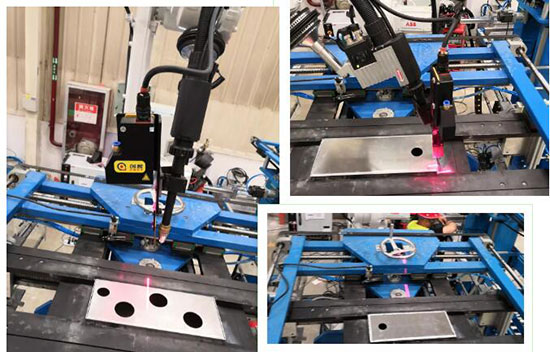
因此,機器人焊接可以精確地在預期的位置進行。優質的激光焊縫跟蹤系統在焊接過程區域內可以不受強光干擾,可以冷卻并防止焊接飛濺,特別適合在惡劣的焊接工藝環境中使用。
借助激光焊縫跟蹤系統用于機器人焊接中,用戶可以節省大量時間,否則這將需要不斷進行校正。與傳統方法相反,由延遲引起的影響也可以得到補償。所有這些都可以改善焊縫,減少廢品率并提高生產率。










