
針對現(xiàn)有部分焊縫自動跟蹤方法依靠單一反饋來控制焊槍產(chǎn)生滯后控制,影響跟蹤的精度這一不足問題,北京創(chuàng)想智控提供一種基于激光傳感器的焊縫跟蹤方法,在傳感器檢測位置超前焊槍的情況下,它可以計算出焊槍實際焊縫偏差,同時可以實時糾正下一步焊槍的走向,大大提高焊縫跟蹤精度和效果。

焊縫跟蹤是實現(xiàn)焊接自動化的關(guān)鍵。目前激光傳感器是最有發(fā)展前景的焊縫跟蹤傳感方式之一,倍受人們的青睞,并逐步在焊接生產(chǎn)中推廣應(yīng)用。
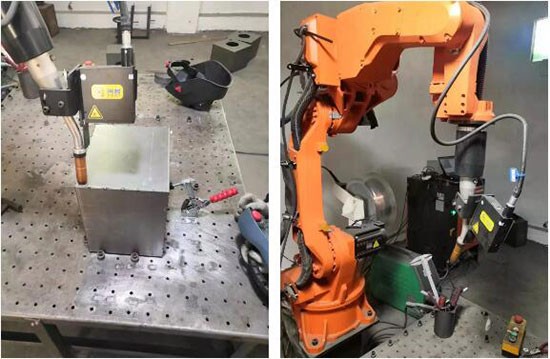
激光傳感器器與焊槍跟蹤機(jī)構(gòu)固定連接在一起,傳感器安裝在焊槍的前方,用于檢測焊縫位置信息。傳感器將圖像信息傳送給圖像采集系統(tǒng),并經(jīng)圖像處理獲取焊縫位置信息,將焊槍位置與該焊縫位置作比較,計算出焊槍偏離焊縫的偏差,即焊縫偏差,利用這一偏差作為反饋給控制器來調(diào)整跟蹤機(jī)構(gòu),使焊槍始終對準(zhǔn)焊縫,實現(xiàn)焊縫跟蹤的目的。
基于激光傳感器的焊縫自動跟蹤系統(tǒng),包括計算機(jī)、焊槍、激光傳感器、圖像采集單元、運(yùn)動控制單元和驅(qū)動單元,激光傳感器、圖像采集單元、運(yùn)動控制單元和驅(qū)動單元安裝在焊槍的上方,圖像采集單元和運(yùn)動控制單元連接計算機(jī),焊槍由驅(qū)動單元帶動;焊槍前方設(shè)置有半導(dǎo)體激光器。
其工作原理是,由半導(dǎo)體激光器發(fā)出一字線激光條紋斜射到焊槍前方的焊件上,經(jīng)激光傳感器攝取并傳送給圖像采集單元,圖像采集單元將采集到的圖像信息存儲在計算機(jī)內(nèi)存,如果焊縫為一直線,則采集到的焊縫圖像中激光條紋為一折線;如果焊縫為一曲線,由于焊縫坡口處高度不一致,因此采集到的焊縫圖像中激光條紋將為一折線(折線反映了焊縫坡口信息),該焊縫圖像經(jīng)計算機(jī)的圖像處理及識別算法,檢測出焊縫中心位置,計算出位置偏差,焊縫自動跟蹤算法依據(jù)偏差、傳動機(jī)構(gòu)特性計算出焊槍糾偏量,由運(yùn)動控制單元產(chǎn)生對應(yīng)控制信號,經(jīng)驅(qū)動器單元帶動焊槍運(yùn)動,使焊槍對準(zhǔn)焊縫。
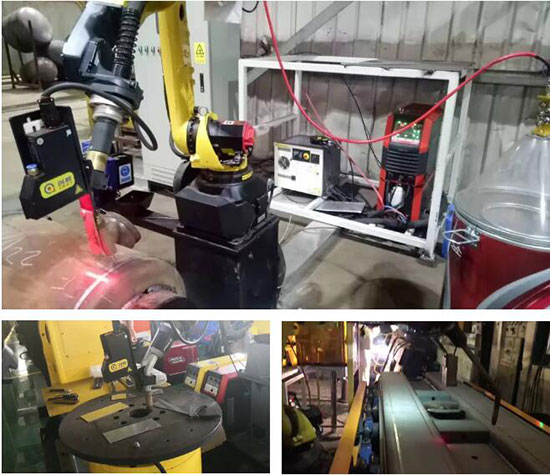
創(chuàng)想激光傳感器, 目前支持適配國內(nèi)外40多種主流機(jī)器人品牌:
國產(chǎn)品牌:新松、埃夫特、時代、廣數(shù)等;
國外品牌:安川、庫卡、發(fā)那科、ABB等。
適配MAG、埋弧焊、氬弧焊、二保焊、鋁焊、攪拌摩擦焊、激光焊等。










