
現在機器人替代人工焊接已越來越普遍,焊接機器人不僅效率高品質好,以及容易管理的特性被許多企業所青睞。但是對于一些精度要求高的工程,單靠焊接機器人無法解決技術問題,這就需要客戶及時增加焊縫跟蹤系統。
為什么焊接機器人需要焊縫跟蹤尋位?
1、焊接機器人在焊接作業過程中會出現工件夾偏、鈑金件熱變形等多種情況,此外焊接機器人在焊接后再進行人工補焊等情況頻繁發生,對于企業來說,非但沒有節省人工成本并且增加了產品的返修率。
2、改善焊接工件來料需要花費巨額成本:上道工序加工設備的更新、高精度工裝的設計及購買。
3、客戶自身實際生產狀況:焊接加工的產品多元化且小批量、焊接精度有要求、對焊接工藝人員要求高。
為了提高焊接機器人的加工效率和使用成本,減少示教的時間和難度,焊縫跟蹤尋位的解決方案迫在眉睫。
什么是焊接機器人焊縫跟蹤尋位?
嚴格來講焊接機器人焊縫跟蹤尋位系統由兩部分組成:焊前通過焊縫尋位功能檢測組對間隙是否合適,并精確達到需要焊接接頭點;焊中實時跟蹤焊縫及監控產品變形量。
焊縫跟蹤:指在焊接位置前方安裝光學傳感器進行數據采集,或者通過電源的焊接參數采集,然后傳輸到焊接機器人,進行自適應的各種模糊控制算法校正焊接機器人或專機的軌跡,實現自適應控制,達到實時的焊縫跟蹤。
焊縫尋位:指使用一次或多次尋找來定位焊縫的過程,通過在焊接之前移動焊接機器人或編輯機器程序路徑來準確定位將要焊接的接頭。
如何實現焊接機器人焊縫跟蹤尋位?
實現焊接機器人焊縫跟蹤尋位的方法有很多種說法。其中常用的兩種為:外設輔助檢測和自身檢測。
外設輔助檢測:激光跟蹤、照相成像跟蹤。這樣的焊縫跟蹤尋位控制系統是通過光學測量設備來進行焊縫相關數據采集,焊接機器人進行數據比對進行自適應手臂運動軌跡的調整,達到焊縫的實時跟蹤。
自身檢測:焊絲傳感檢測、焊接參數實時檢測。
焊縫跟蹤是在焊接時實時檢測出焊縫的偏差,并調整焊接路徑和焊接參數,保證焊接質量的可靠性。由于工件的加工誤差(工件間的尺寸差異、坡口的準備情況等)、裝夾精度以及焊接時的熱變形等因素的存在,以示教-再現方式工作的焊接機器人在焊接時常常因為焊縫和示教軌跡有偏差而導致焊接質量下降。所以焊縫跟蹤是保證焊接機器人焊接質量的一個重要的方面。
傳感器是焊縫自動跟蹤系統的關鍵部分。其作用是檢測出焊縫的位置和形狀信息并轉化為電信號。控制系統才能對信號進行處理,并根據檢測結果控制自動調節機構調整焊槍位置,從而實現焊縫自動跟蹤。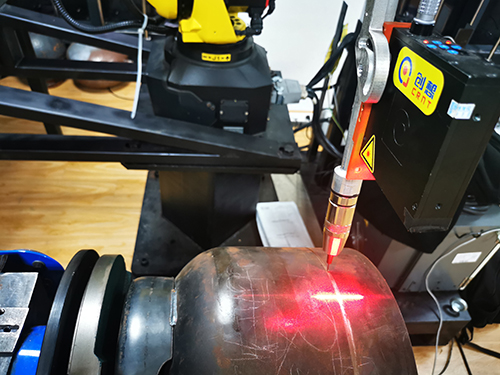
創想智控激光焊縫跟蹤傳感器配合焊接機器人使用等于是給機器人裝上了眼睛,可以正確引導機器人進行焊接定位。










