實現原理
激光焊縫跟蹤器采用三角測量原理,通過線激光,CCD完成對焊縫位置的識別。
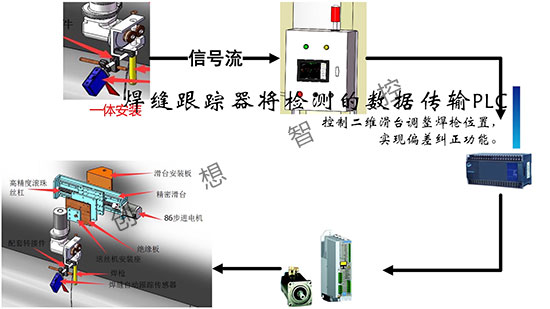
系統連接方式 數據流向
焊縫跟蹤器將檢測的數據傳輸PLC,控制二維滑臺調整焊槍位置,實現偏差糾正功能。
功能描述
激光前置測量焊縫的偏差,存儲到運動控制器(PLC)中,控制器根據轉過的角度,修正補償偏差,實現對焊縫的對準。
功能演示
回放(擺動)第一圈實時跟蹤過程中,記錄運動的軌跡。當有需要多層多道焊接需求時,回放第一圈數據即可。同時還能設置焊道的擺幅、擺頻、相鄰偏置等參數。
在線咨詢
微信咨詢
電話咨詢
QQ咨詢
返回頂部
產品中心
解決方案
聯系我們
復制微信成功
微信號:18911522201
快去添加微信好友,詳細了解產品信息